

新闻资讯



十沣赋能人形机器人行业,加速具身智能落地
在2025世界机器人大会上,十沣科技展示了其最新的工业仿真软件能力,发布了整合设计、仿真、优化与训练功能的Demain Horizon(明日地平线)平台。仿真正在从“辅助工具”走向“研发底座”。
人形机器人研发多学科交织,仿真需求凸显
人形机器人研发的复杂性由其天然的系统特性决定。在仿真训练中,千台机器人同时运动,一个步态动作往往涉及上百个关节、数千个零部件,刚柔耦合、非线性接触、多体动力学和多物理场交织在一起,任何细微的仿真计算误差都可能造成对机器人状态的误判,引发整体运动失衡。
过去,CAD建模、CAE仿真、控制训练相互独立,数据标准不一,导致研发团队难以在虚拟空间中进行系统化探索。工程师只能依赖经验积累和反复的实物试验来修正设计,这不仅推高了成本,也延缓了产品上市。
随着人形机器人从实验室逐步走向产业化,行业迫切需要一种能够支撑跨学科、全链路研发的技术底座。而设计-仿真-训练一体化平台为控制算法提供了可信的物理模型支持,使强化学习摆脱“黑箱式”试错,训练过程更高效、更可控。对于企业而言,这意味着从实验室到市场的路径被大幅压缩,产品验证更快、风险更低。
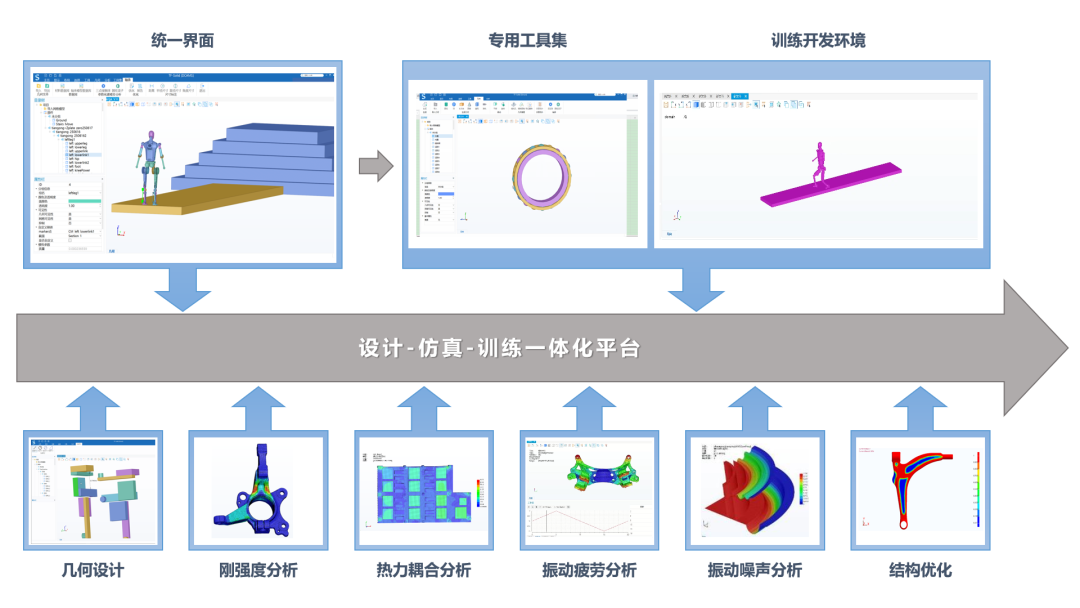
人形机器人设计-仿真-训练一体化平台
十沣一体化解决方案:高保真、多物理场
十沣依托自主研发的工业仿真内核,为人形机器人研发构建了一套覆盖“设计—仿真—训练”的一体化解决方案。
其核心优势首先体现在高保真仿真。其物理引擎支持刚柔耦合多体动力学建模。在典型的四连杆结构测试中,仿真结果相对于DAE解更贴近于FEA解,相较常规FEA方法计算速度快两个数量级,精度误差不超过3%。
其次,人形机器人本体在某些关键部位会采用并联机构,以提升刚性、负载能力或动态响应。比如在腿部/踝部采用六自由度并联平台,形成闭环并联运动链。
传统多体动力学仿真软件通常将此类结构简化为开环系统,导致计算精度受限。十沣软件则能够完整处理闭环系统,通过在整体方程中引入等效约束力进行求解,从而有效保证仿真精度。

基于多层质点系的多体动力学仿真,可直接处理局部闭环结构,支持刚柔耦合与非线性接触
同时,十沣仿真涵盖完备的多物理场仿真能力,可真实再现人形机器人在沙地、碎石地行走及搬运液体持水杯行走等复杂场景。
通过集成TF-Solid固体仿真平台的粒子模块,同步解析实体-粒子-流体交互:沙粒滑移、碎石塌陷、液体晃动对人形机器人足地接触、质心偏移及关节力矩的瞬态影响,提前暴露打滑、溅洒、倾覆风险;更可量化评估不同步态、握持策略下的稳定性裕度,为算法优化与硬件冗余设计提供高置信数据,显著降低实机迭代成本。
总而言之,在性能优化上,柔性化设计与多场耦合仿真有助于提高机器人在复杂工况下的稳定性与适应性,显著延长其关键部件的寿命。

本体脚部与沙地的耦合仿真
从辅助工具到研发底座:研发效率与可靠性双提升
十沣工业仿真软件正在成为人形机器人研发的关键引擎。高保真计算与多物理场耦合显著缩短仿真周期,提升迭代效率并降低试验成本。随着行业加速演进,仿真技术正由辅助工具升级为集成研发底座,推动从“经验驱动”迈向“数据驱动、模型驱动”。
凭借自主内核与平台化架构,十沣为行业提供本土化选择,也加速人形机器人研发的创新与可靠性提升。
最新资讯